Overview
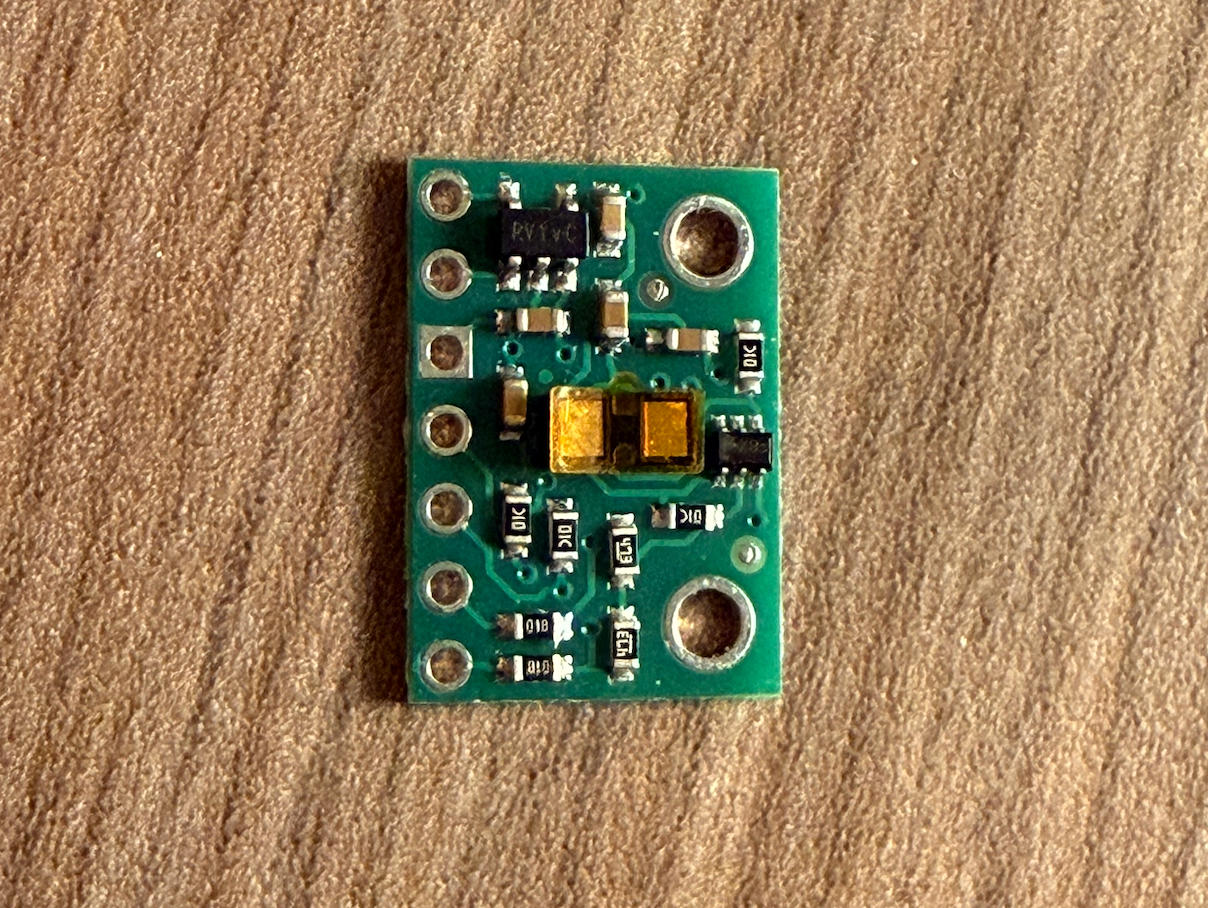
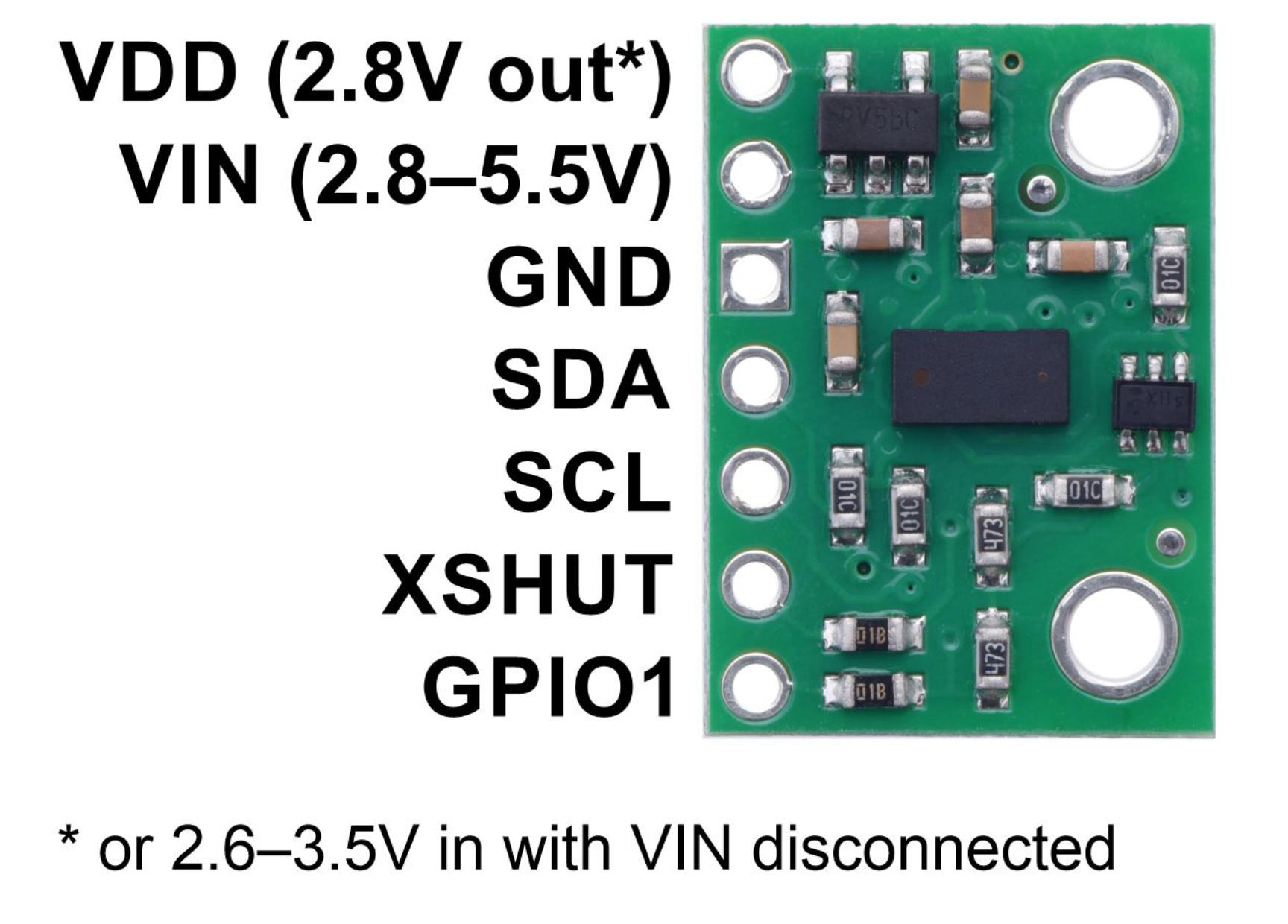
Considering what my final project needs, I decided to add another PCB module this week. This assignment focuses on creating a distance sensor that measures physical distance and displays the readings on a screen. The sensor I chose is the VL53L1X, which I selected for its clear pin labeling. After researching how this sensor works, I determined that I only needed four pins to make it functional: VDD, GND, SDA, SCL.
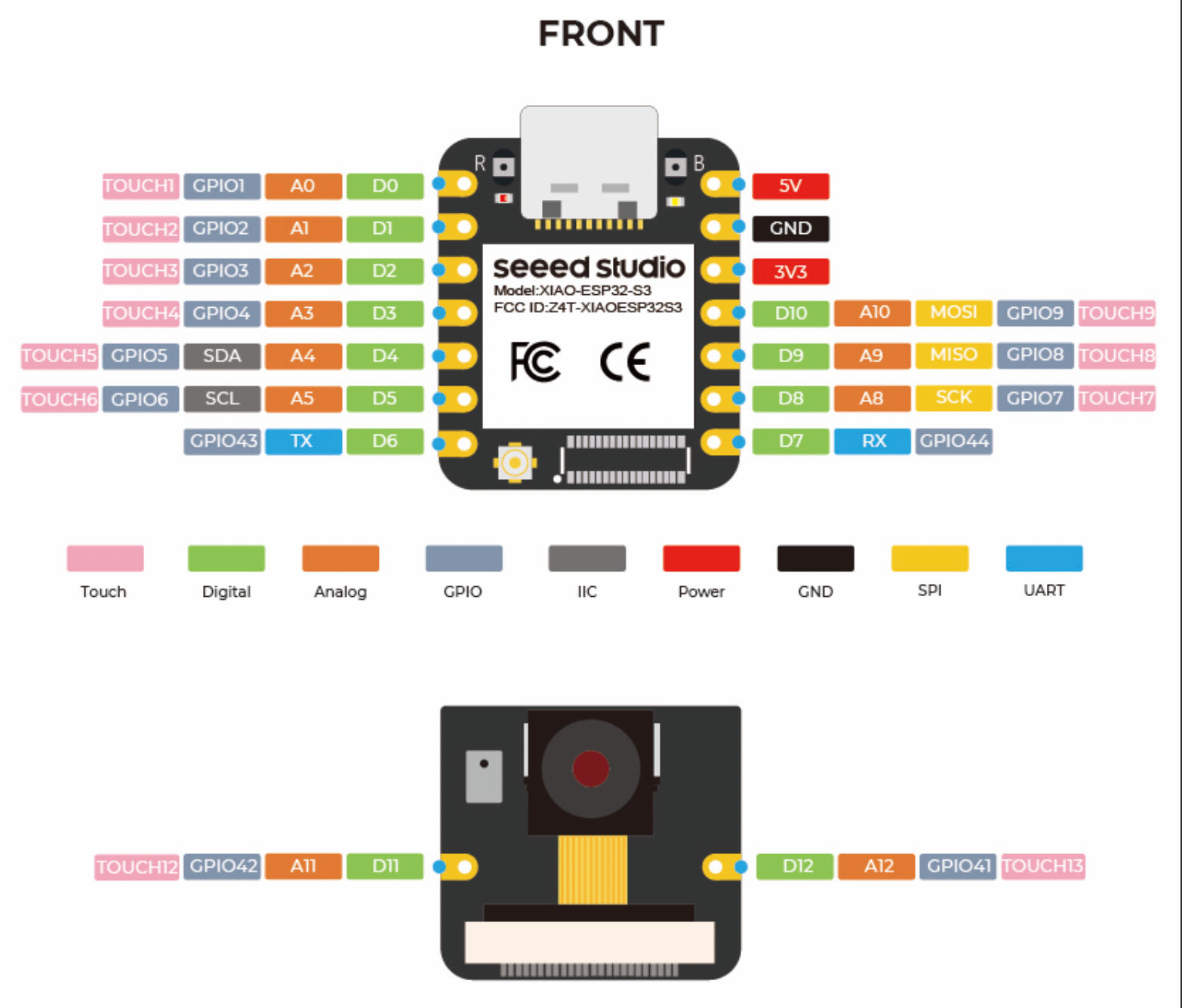
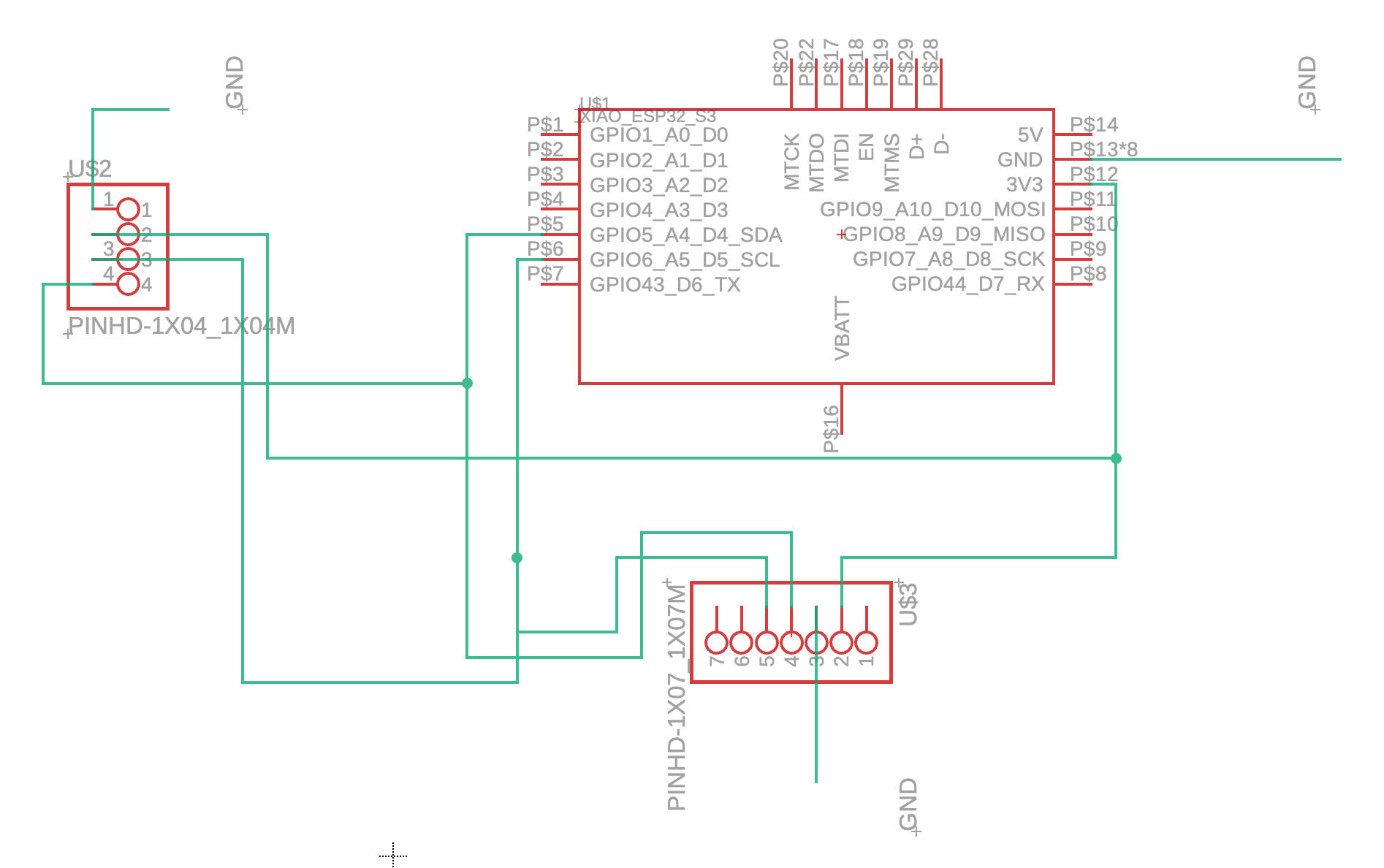
I downloaded the XIAO ESP32S3 pinlist and VL53L1X pinlist to guide my PCB design.
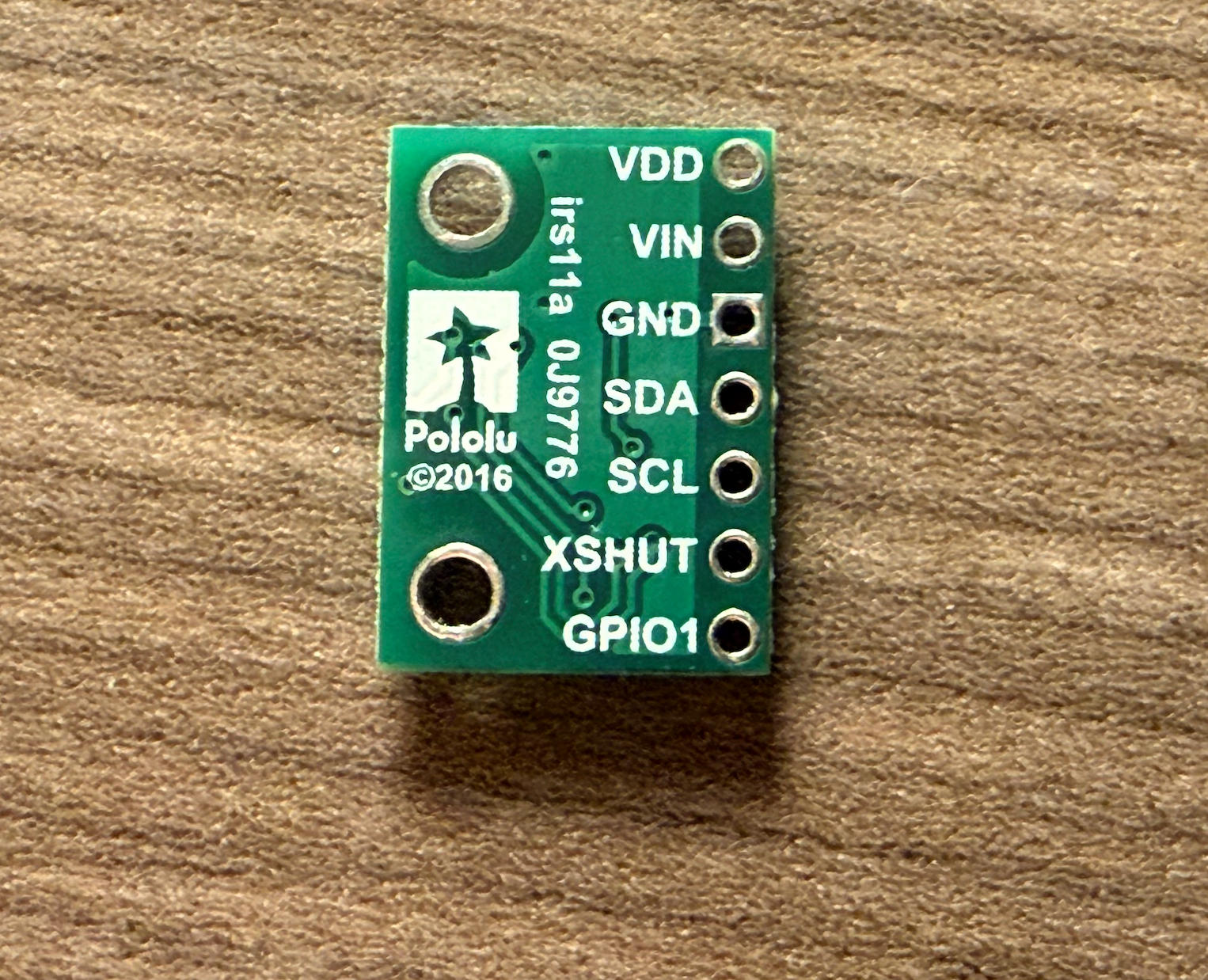
VL53L1X Pin Overview
The VL53L1X has six pins. Here's what each one does:
VIN — Power input, typically 3.3V or 5V.
GND — Ground reference. Must be connected to the microcontroller's GND pin.
SCL — I²C clock line. Connect to the microcontroller's SCL pin. The microcontroller controls the clock pulses on this line.
SDA — I²C data line. Connect to the microcontroller's SDA pin. All data (commands and readings) flows through this line. Together, SCL and SDA form the entire I²C communication interface.
GPIO — A general-purpose output from the sensor. This pin is optional and can be used as an interrupt output, for example.
XSHUT — Shutdown pin (active-low hardware reset). Pull LOW to shut down the sensor, or pull HIGH (3.3V) to wake it up.
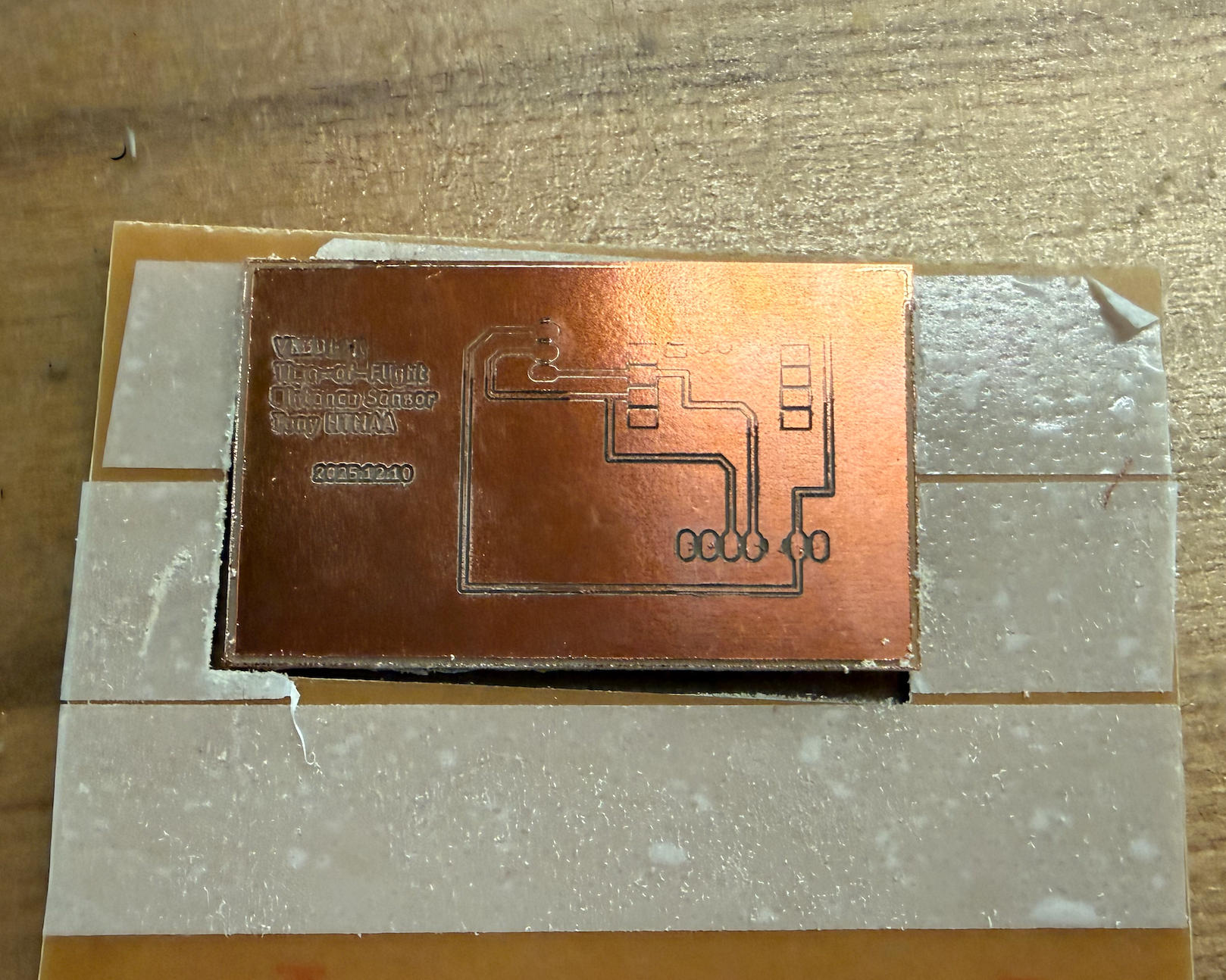
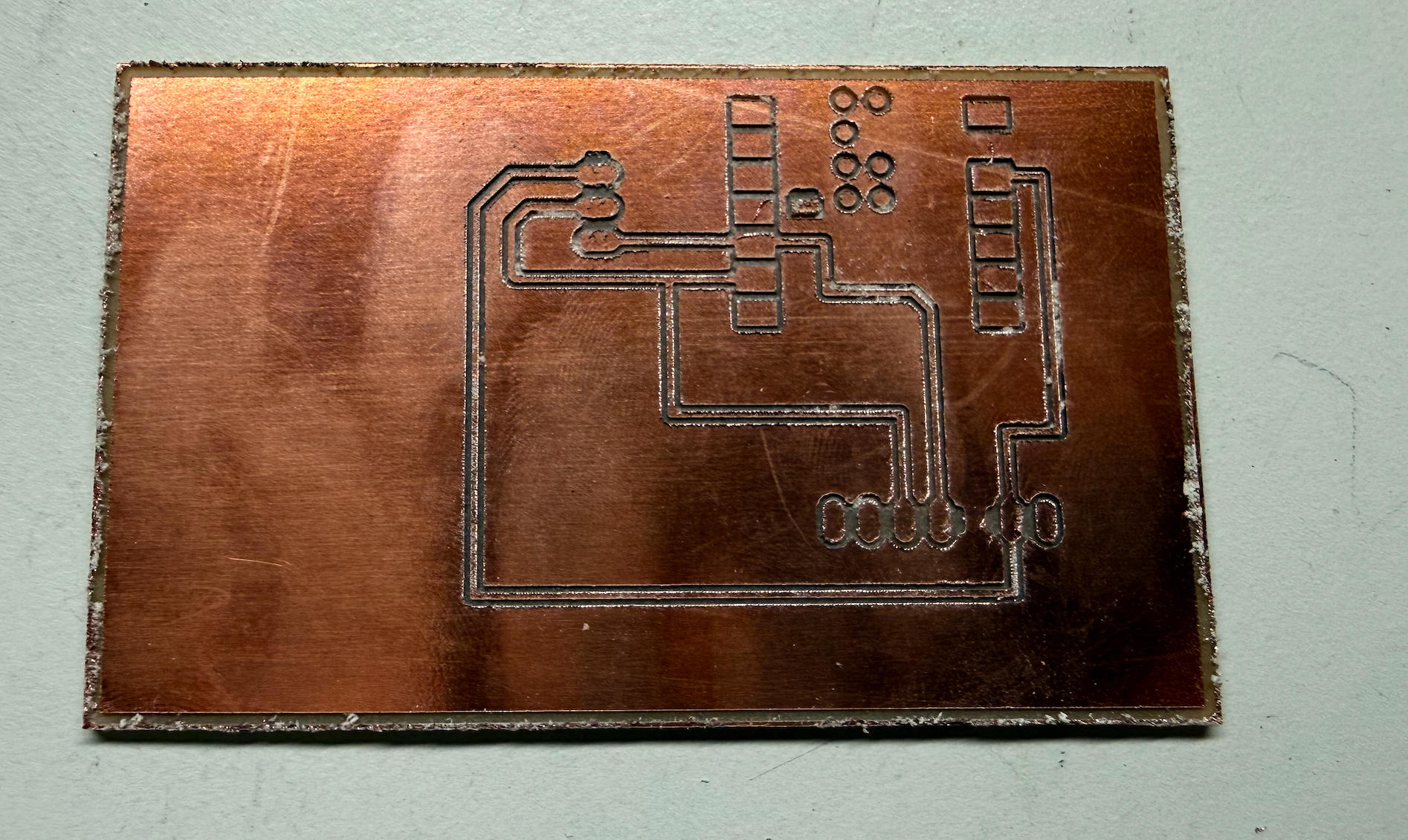
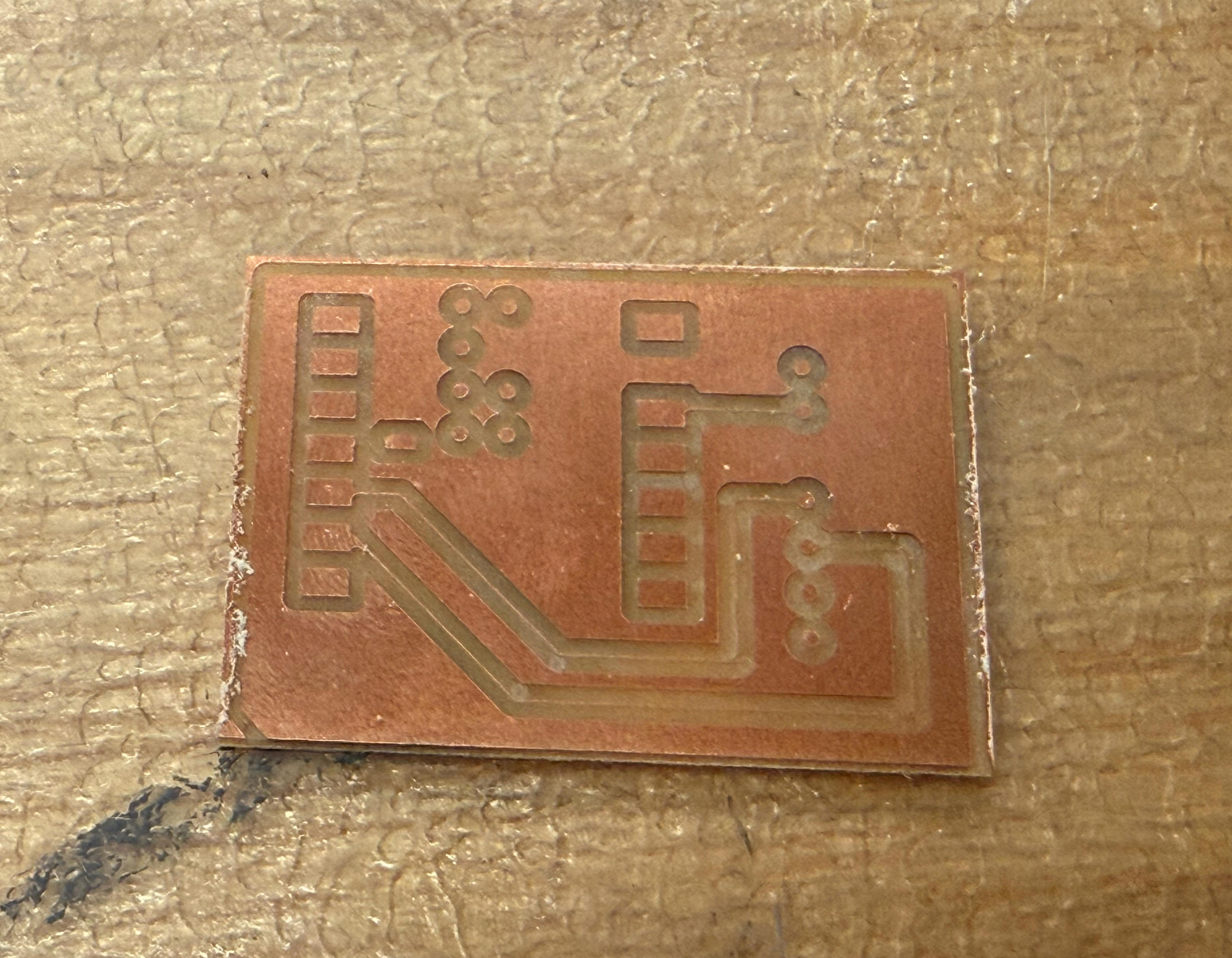
PCB Design
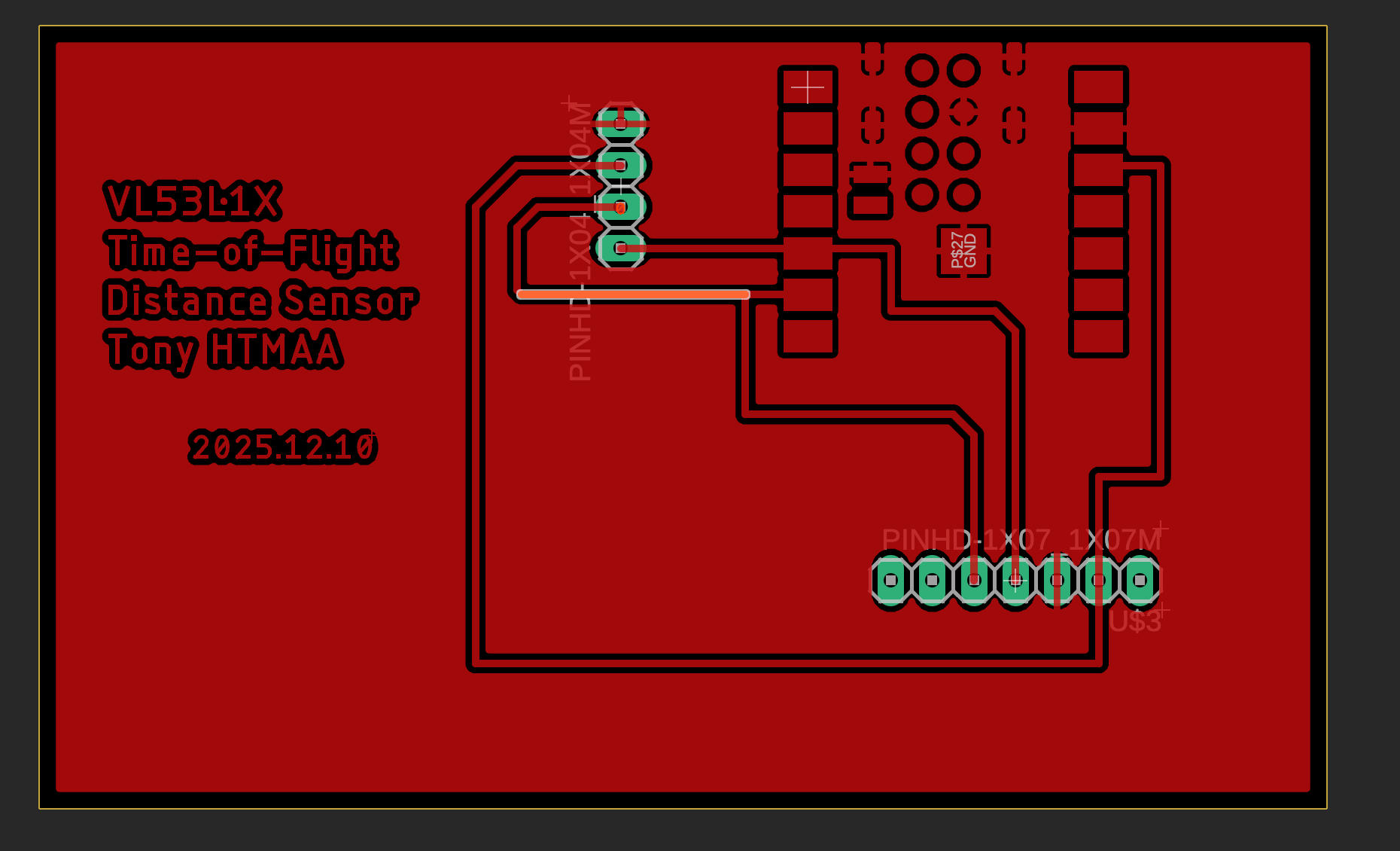
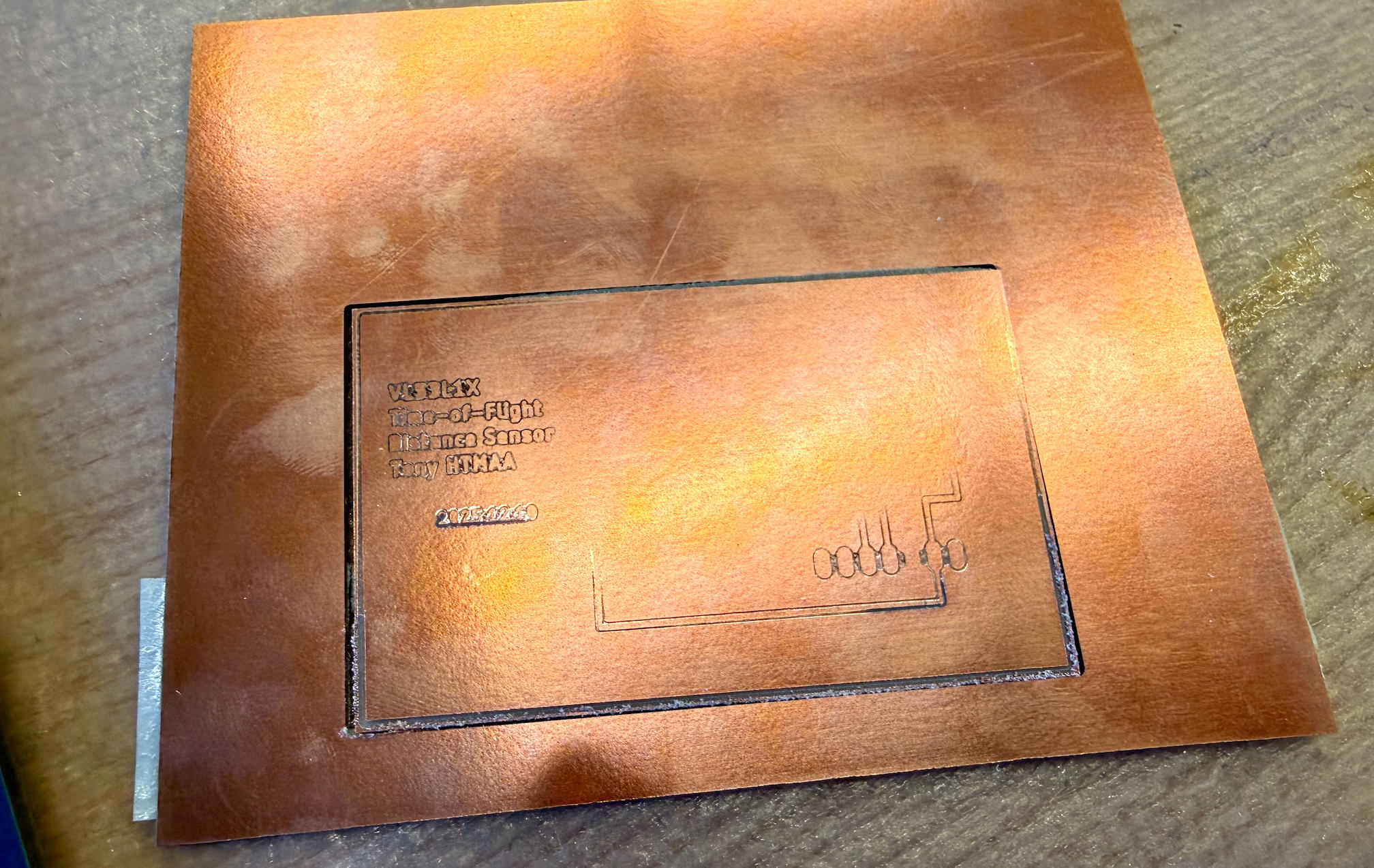
Board Milling
Files
Programming & Testing
Before programming, I needed to install the VL53L1X library.
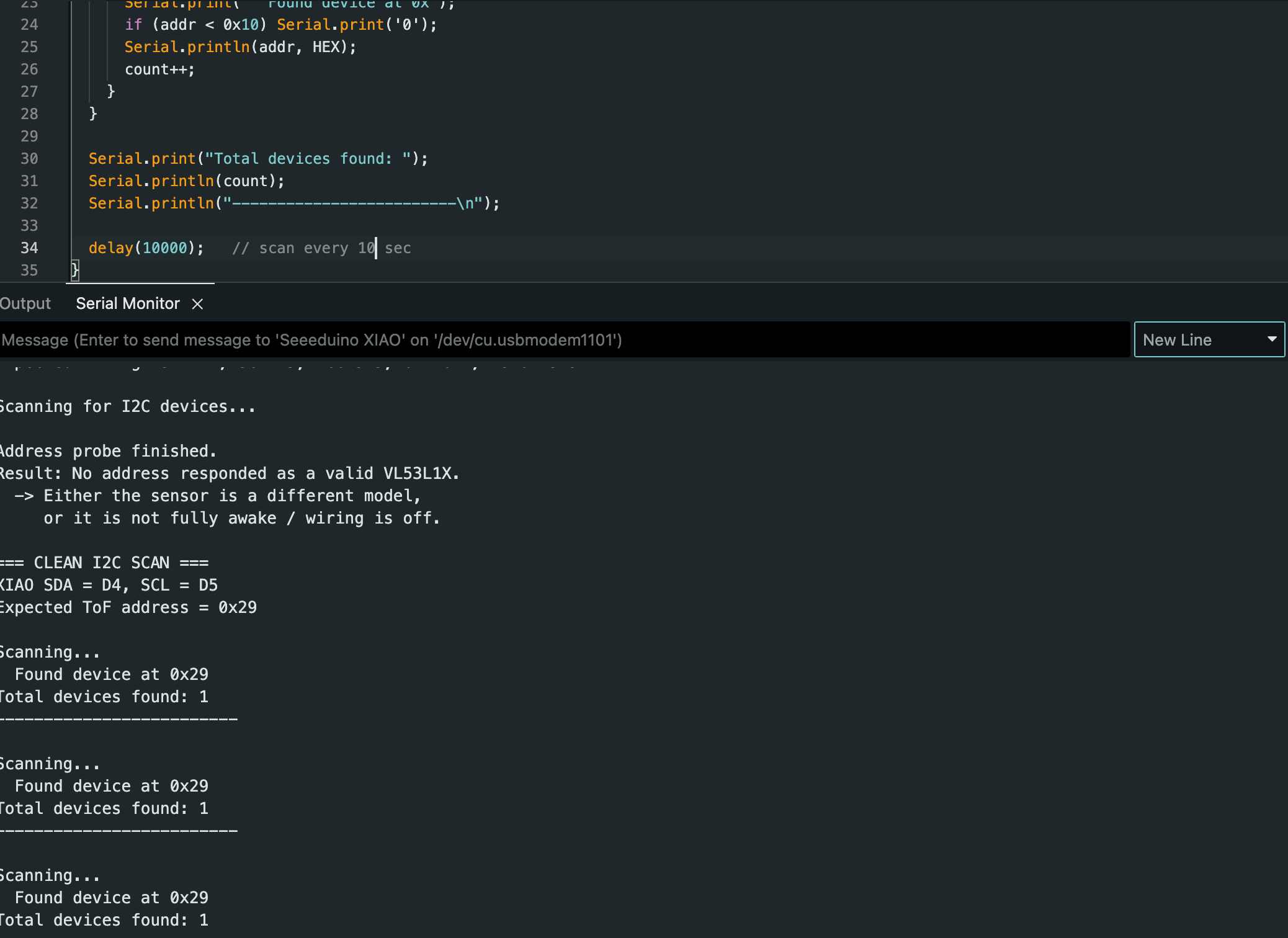
During initial testing with simple wire connections, I encountered an unexpected problem: I wrote a program to scan for I²C devices, and the result shocked me—the system detected 120+ devices! After research, I determined that my wire was too long. Long wires cause HIGH and LOW signals to drift into undefined floating states, creating noise. Once I switched to shorter wires, the problem disappeared and I detected only one device at address 0x29.
#include <Wire.h>
// Change these if you're on a board where you can re-map I2C pins (ESP32, etc.)
#ifndef SDA
#define SDA -1
#endif
#ifndef SCL
#define SCL -1
#endif
static const uint8_t VL53_ADDR = 0x29;
// ---- Low-level I2C helpers for VL53L1X register access ----
// VL53L1X uses 16-bit register addresses.
bool writeReg16(uint8_t addr, uint16_t reg, uint8_t value) {
Wire.beginTransmission(addr);
Wire.write((uint8_t)(reg >> 8));
Wire.write((uint8_t)(reg & 0xFF));
Wire.write(value);
return (Wire.endTransmission() == 0);
}
bool readReg8(uint8_t addr, uint16_t reg, uint8_t &out) {
Wire.beginTransmission(addr);
Wire.write((uint8_t)(reg >> 8));
Wire.write((uint8_t)(reg & 0xFF));
if (Wire.endTransmission(false) != 0) {
return false;
}
int n = Wire.requestFrom((int)addr, 1);
if (n != 1) return false;
out = Wire.read();
return true;
}
void i2cScan() {
Serial.println("=== I2C scan ===");
int found = 0;
for (uint8_t a = 1; a < 127; a++) {
Wire.beginTransmission(a);
uint8_t err = Wire.endTransmission();
if (err == 0) {
Serial.print(" Found device at 0x");
if (a < 16) Serial.print("0");
Serial.println(a, HEX);
found++;
}
}
Serial.print("Total I2C devices: ");
Serial.println(found);
Serial.println("=== I2C scan end ===\n");
}
void setup() {
Serial.begin(115200);
delay(800);
Serial.println("\nVL53L1X I2C + ID Test\n");
Wire.begin();
Wire.setClock(400000);
i2cScan();
Serial.println("Checking for device at 0x29...");
Wire.beginTransmission(VL53_ADDR);
uint8_t err = Wire.endTransmission();
Serial.print(" endTransmission returned: ");
Serial.println(err);
if (err != 0) {
Serial.println("\n❌ No ACK from 0x29.\n");
return;
}
Serial.println("✅ 0x29 ACKed.\n");
Serial.println("Reading Model ID (reg 0x010F)...");
uint8_t modelId = 0;
bool ok = readReg8(VL53_ADDR, 0x010F, modelId);
if (!ok) {
Serial.println("❌ Failed to read Model ID.");
return;
}
Serial.print("✅ Model ID read: 0x");
Serial.println(modelId, HEX);
}
void loop() {
delay(3000);
i2cScan();
}
Testing the Sensor
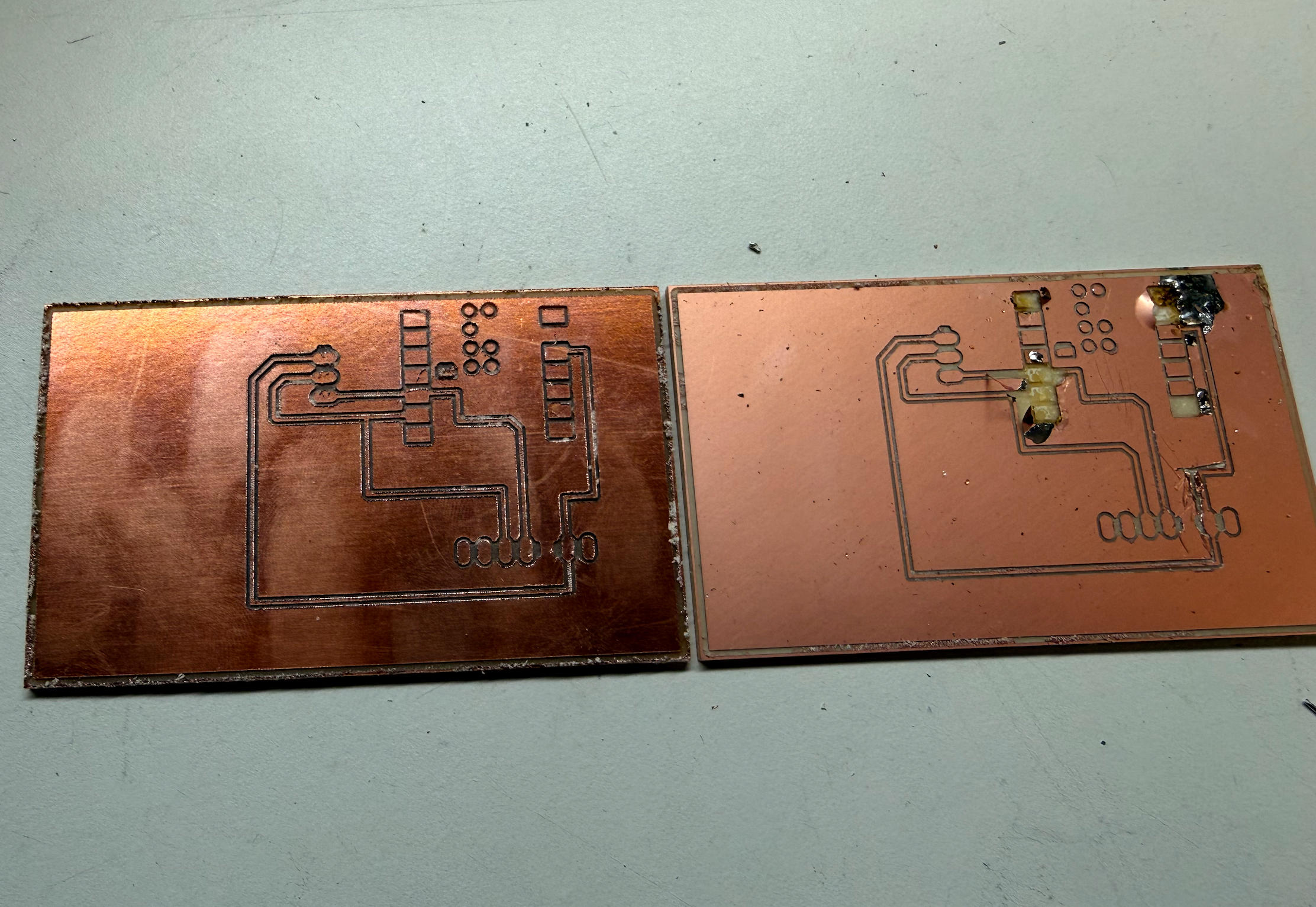
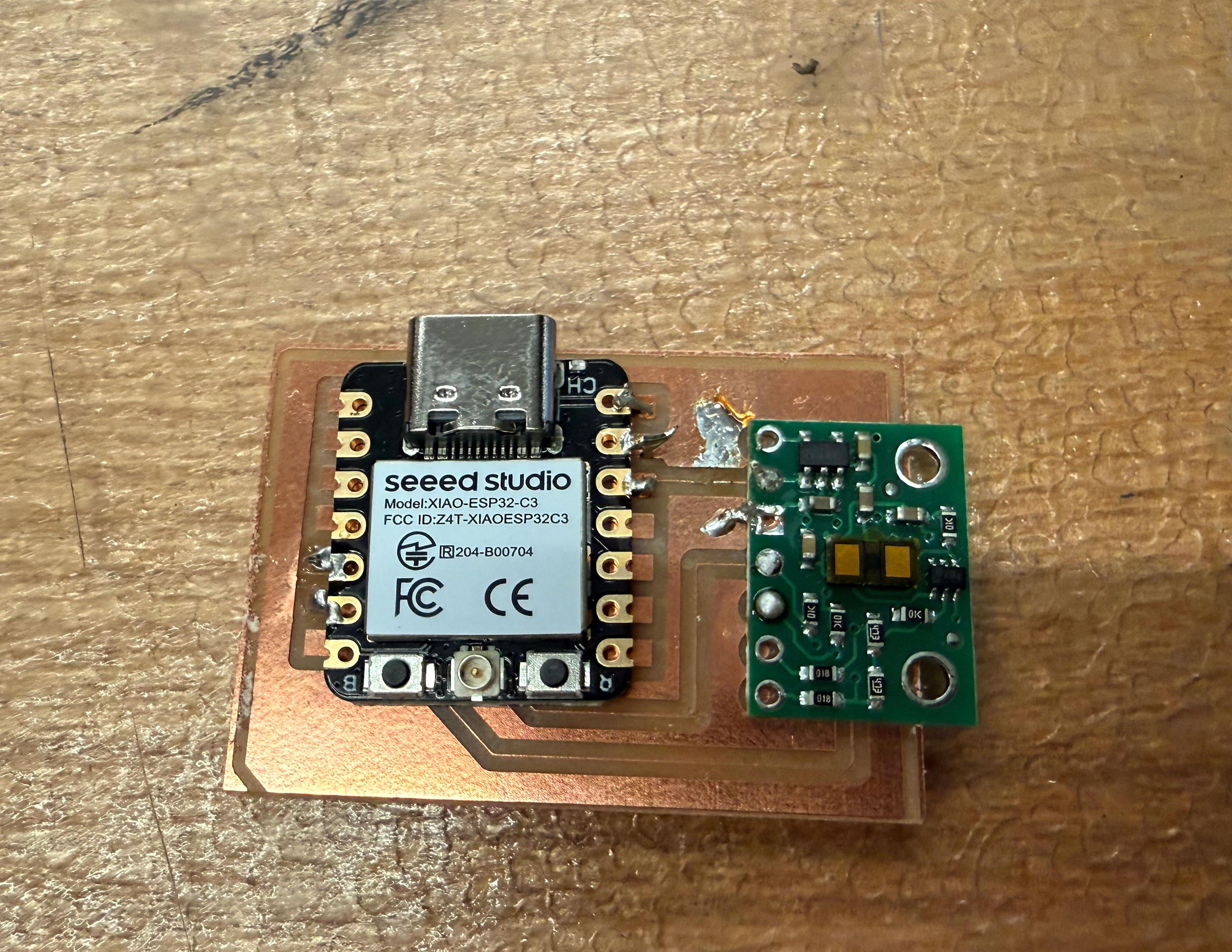
Since the connection was simple and I had experienced a major setback while soldering the board, I decided to first connect the electronics with temporary wires and write a test program to verify the sensor works. The results were surprisingly smooth—it worked, though with a few caveats I'll discuss shortly.
Initial Observations
1) Readings showed small variations (mm-level jitter)
Even when the sensor was placed on a stable table measuring the distance to the ceiling, the returned values were not identical each time. The readings were largely consistent, but each measurement varied by a few millimeters. This suggests the sensor has a small but noticeable measurement error or noise under real conditions.
2) "Zero" readings occurred before physical contact
When I moved my hand close to the sensor, it reported zero distance before physically touching it.
I could get a reading of 0 even when my palm was approximately 3–4 cm away.
This suggests there may be a minimum measurable range or clamping behavior—the sensor might report 0
below a certain threshold distance rather than reporting negative values. In other words,
the displayed value may behave like: max(0, real_distance - threshold).
Display Integration
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
#define OLED_ADDR 0x3C
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void setup() {
Serial.begin(115200);
// Use board default I2C pins
Wire.begin();
Wire.setClock(100000);
if (!display.begin(SSD1306_SWITCHCAPVCC, OLED_ADDR)) {
Serial.println("SSD1306 init failed");
while (true) delay(10);
}
display.clearDisplay();
display.display();
Serial.println("OLED initialized");
}
void loop() {
static uint32_t counter = 0;
display.clearDisplay();
// Visual proof it works
display.drawRect(0, 0, 128, 64, SSD1306_WHITE);
display.fillRect(5, 5, 30, 20, SSD1306_WHITE);
display.setTextColor(SSD1306_WHITE);
display.setTextSize(2);
display.setCursor(45, 10);
display.println("TEST");
display.setTextSize(1);
display.setCursor(45, 40);
display.print("Count: ");
display.println(counter++);
display.display();
delay(200);
}